hi3516 camera im178
基于海思HI3559CV100移植IMX178 - mango_yang226的博客 - CSDN博客
主芯片:HI3559CV100
主芯片手册:Hi3559A╱C V100 ultra-HD Mobile Camera SoC 用户指南.pdf
主芯片MPP手册:HiMPP V4_Password_Removed.pdf
SENSOR:IMX178
SENSOR手册:IMX178LQJ-C_Data_Sheet.pdf
SDK:Hi3559AV100R001C02SPC010
IMX178的移植,主要涉及SENSOR端寄存器的配置、主芯片端VI各模块的配置,本文主要基于这两点进行移植过程的描述,其他功能模调用、PINMUX配置、驱动调用、Makefile修改等,可参考IMX334。
IMX178调试
根据SDK中的IMX334,首先拷贝sony_imx334文件夹,重命名为sony_imx178,并将所有334相关字段全部改为178
sony_imx178文件夹中主要包含imx178_cmos.c(图像质量相关)、imx178_sensor_ctl.c(寄存器配置相关),IMX178的调试主要包括I2C调试和寄存器配置,主要集中在imx178_sensor_ctl.c文件中
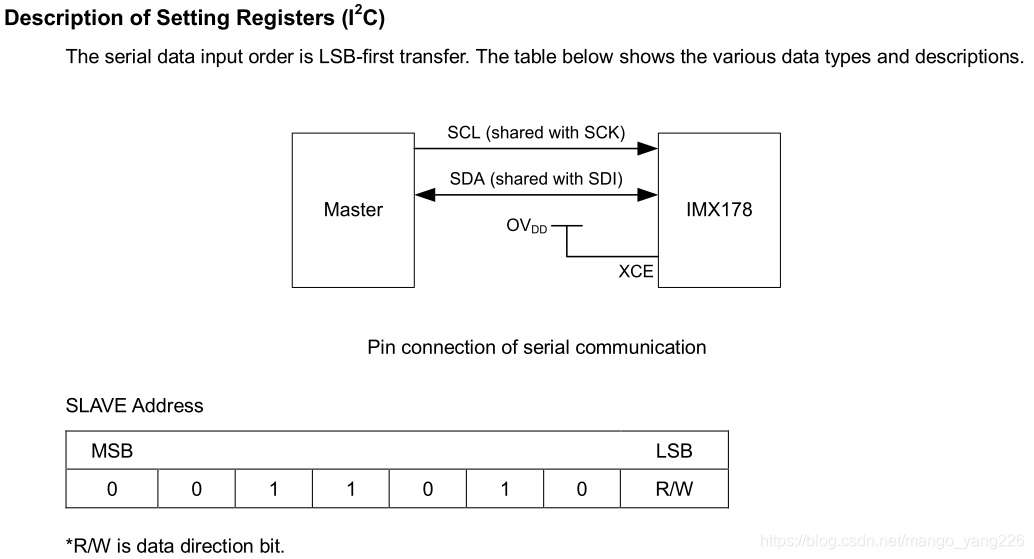
IMX178的I2C调试
参考IMX178手册,获取I2C Slave Address为0x34,Slave Address长度为8bit,Register Address长度为16比特,高位在前、低位在后
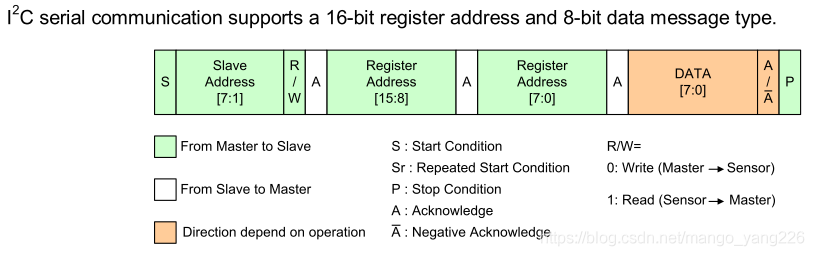
I2C写寄存器写入方式如下
int imx178_write_register(VI_PIPE ViPipe, int addr, int data){ if (0 > g_fd[ViPipe]) { return HI_SUCCESS; } int idx = 0; int ret; char buf[8]; if (imx178_addr_byte == 2) { buf[idx] = (addr >> 8) & 0xff; idx++; buf[idx] = addr & 0xff; idx++; } else { buf[idx] = addr & 0xff; idx++; } if (imx178_data_byte == 2) { buf[idx] = (data >> 8) & 0xff; idx++; buf[idx] = data & 0xff; idx++; } else { buf[idx] = data & 0xff; idx++; } ret = write(g_fd[ViPipe], buf, (imx178_addr_byte + imx178_data_byte)); if (ret < 0) { ISP_TRACE(HI_DBG_ERR, "I2C_WRITE DATA error!\n"); return HI_FAILURE; } return HI_SUCCESS;}
IMX178的寄存器配置
参考IMX178手册,将SENSOR配置为1080P60、12bit位宽、4通道,INCK选择27MHz模式
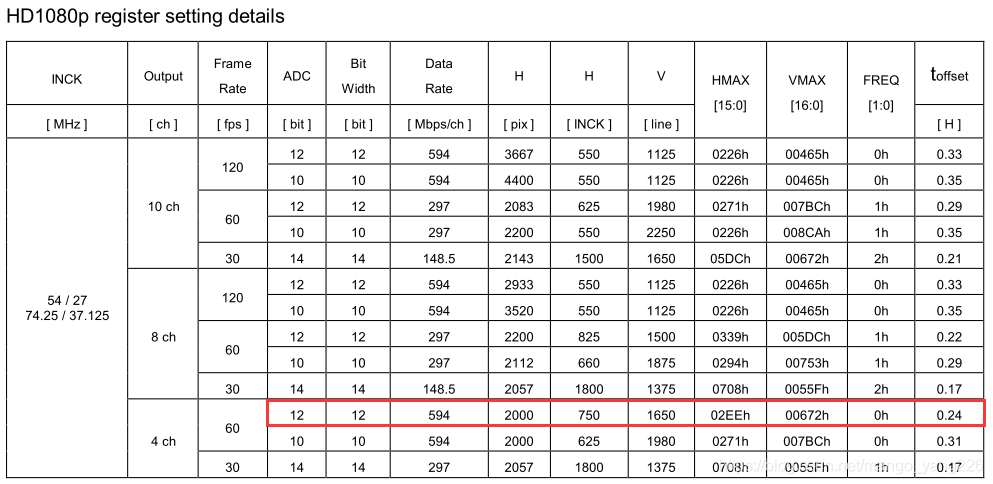

寄存器配置代码片段如下
void imx178_linear_1080P60_12bit_init(VI_PIPE ViPipe){ /* imx178 1080@60fps */ imx178_write_register(ViPipe, 0x3000, 0x07); /* standby */ imx178_write_register(ViPipe, 0x300E, 0x01); /* MODE, Window cropping 5.0M (4:3) */ imx178_write_register(ViPipe, 0x300F, 0x00); /* WINMODE, Window cropping 5.0M (4:3) */ imx178_write_register(ViPipe, 0x3010, 0x00); /* TCYCLE */ imx178_write_register(ViPipe, 0x3066, 0x03); /* VNDMY */ imx178_write_register(ViPipe, 0x302C, 0x72); imx178_write_register(ViPipe, 0x302D, 0x06); /* VMAX */ imx178_write_register(ViPipe, 0x302F, 0xEE); imx178_write_register(ViPipe, 0x3030, 0x02); /* HMAX */ imx178_write_register(ViPipe, 0x300D, 0x05); /* ADBIT, ADBITFREQ (ADC 12-bit) */ imx178_write_register(ViPipe, 0x3059, 0x31); /* ODBIT, OPORTSEL (12-BIT), 4CH */ imx178_write_register(ViPipe, 0x3004, 0x03); /* STBLVDS, 4CH ACTIVE */ /* register setting details */ imx178_write_register(ViPipe, 0x3101, 0x30); /* FREQ[1:0] */ /* FREQ setting (INCK=27MHz) */ imx178_write_register(ViPipe, 0x310C, 0x00); imx178_write_register(ViPipe, 0x33BE, 0x21); imx178_write_register(ViPipe, 0x33BF, 0x21); imx178_write_register(ViPipe, 0x33C0, 0x2C); imx178_write_register(ViPipe, 0x33C1, 0x2C); imx178_write_register(ViPipe, 0x33C2, 0x21); imx178_write_register(ViPipe, 0x33C3, 0x2C); imx178_write_register(ViPipe, 0x33C4, 0x2C); imx178_write_register(ViPipe, 0x33C5, 0x00); imx178_write_register(ViPipe, 0x311C, 0x34); ...}
HI3559主芯片配置
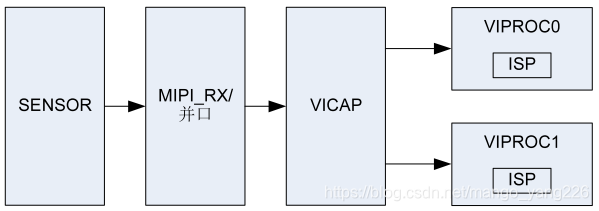
主芯片调试主要分为MIPI_Rx配置、VI配置、ISP配置
MIPI_RX配置
查看SENSOR手册,确认SENSOR图像输出信号为LVDS
◆ Supports I/O switching
Low voltage LVDS (150 mVp-p) serial (4 ch / 8 ch / 10 ch switching) DDR output
查看主芯片手册,确认MIPI_Rx支持LVDS信号,将视频输入接口配置为LVDS即可
MIPI Rx 支持 MIPI D-PHY 、 LVDS ( Low-Voltage Differential Signal )、 HiSPi ( High-Speed Serial Pixel Interface )等串行视频信号输入,串行视频接口可以提供更高的传输带宽,增强传输的稳定性。
mpp/sample/common/sample_comm_vi.c文件中,配置MIPI_RX的combo-PHY属性为LVDS、12bit位宽、4通道、分辨率1920*1080
combo_dev_attr_t LVDS_4lane_SENSOR_IMX178_12BIT_1080p_ATTR ={ /* input mode */ .devno = 0, .input_mode = INPUT_MODE_LVDS, .data_rate = MIPI_DATA_RATE_X1, .img_rect = {0, 0, 1920, 1080}, { .lvds_attr = { DATA_TYPE_RAW_12BIT, HI_WDR_MODE_NONE, LVDS_SYNC_MODE_SAV, .vsync_attr = {LVDS_VSYNC_NORMAL, 0, 0}, .fid_attr = {LVDS_FID_NONE, HI_TRUE}, LVDS_ENDIAN_BIG, LVDS_ENDIAN_BIG, .lane_id = {0, 1, 2, 3, -1, -1, -1, -1}, .sync_code = { {{0xab0, 0xb60, 0x800, 0x9d0}, {0xab0, 0xb60, 0x800, 0x9d0}, {0xab0, 0xb60, 0x800, 0x9d0}, {0xab0, 0xb60, 0x800, 0x9d0}}, {{0xab0, 0xb60, 0x800, 0x9d0}, {0xab0, 0xb60, 0x800, 0x9d0}, {0xab0, 0xb60, 0x800, 0x9d0}, {0xab0, 0xb60, 0x800, 0x9d0}}, {{0xab0, 0xb60, 0x800, 0x9d0}, {0xab0, 0xb60, 0x800, 0x9d0}, {0xab0, 0xb60, 0x800, 0x9d0}, {0xab0, 0xb60, 0x800, 0x9d0}}, {{0xab0, 0xb60, 0x800, 0x9d0}, {0xab0, 0xb60, 0x800, 0x9d0}, {0xab0, 0xb60, 0x800, 0x9d0}, {0xab0, 0xb60, 0x800, 0x9d0}}, {{0xab0, 0xb60, 0x800, 0x9d0}, {0xab0, 0xb60, 0x800, 0x9d0}, {0xab0, 0xb60, 0x800, 0x9d0}, {0xab0, 0xb60, 0x800, 0x9d0}}, {{0xab0, 0xb60, 0x800, 0x9d0}, {0xab0, 0xb60, 0x800, 0x9d0}, {0xab0, 0xb60, 0x800, 0x9d0}, {0xab0, 0xb60, 0x800, 0x9d0}}, {{0xab0, 0xb60, 0x800, 0x9d0}, {0xab0, 0xb60, 0x800, 0x9d0}, {0xab0, 0xb60, 0x800, 0x9d0}, {0xab0, 0xb60, 0x800, 0x9d0}}, {{0xab0, 0xb60, 0x800, 0x9d0}, {0xab0, 0xb60, 0x800, 0x9d0}, {0xab0, 0xb60, 0x800, 0x9d0}, {0xab0, 0xb60, 0x800, 0x9d0}} } } }};
drv/interdrv/sysconfig/sys_config.c文件中,配置bus_type为I2C、配置输出给SENSOR的参考时钟为24MHz
备注:按手册将参考时钟配置为27MHz时,SENSOR输出帧率为77FPS,而参考时钟配置为24MHz时,SENSOR输出帧率为58FPS,因此配置为24MHz
static BUS_TYPE parse_sensor_bus_type(char *name){ ... bus_type = BUS_TYPE_I2C; ... return bus_type;}
/*0x0: 74.25MHz; 0x1: 72MHz;0x2: 54MHz;0x3: 50MHz;0x4: 24MHz;0x6: 32.4MHz;0x8: 37.125MHz;0x9: 36MHz;0xA: 27MHz;0xB: 25MHz;0xC: 12MHz;*/static int parse_sensor_clock(char *name){ int clock = 0x0; ... clock = 0x4; // 24MHZ ... return clock;}
drv/interdrv/mipi/hi_mipi.h文件中,修改LVDS最大支持4通道
#define MAX_LANE_NUM_PER_LINK 2 /* one link has 2 lanes at most */...#define LVDS_LANE_NUM (MAX_LANE_NUM_PER_LINK * 4)
VI配置
mpp/sample/common/sample_comm_vi.c中修改VI相关配置
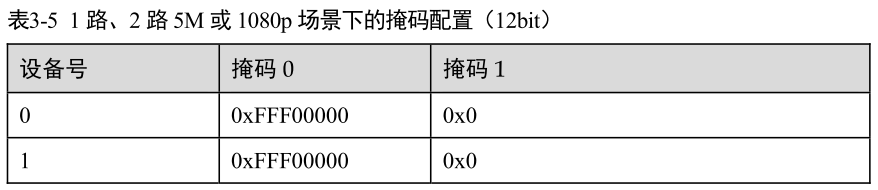
VI DEV配置,主要配置输入接口LVDS、掩码0xFFF00000、图像格式RGB、分辨率1920*1080
VI_DEV_ATTR_S DEV_ATTR_IMX178_LVDS_BASE ={ /* interface mode */ VI_MODE_LVDS, /* multiplex mode */ VI_WORK_MODE_1Multiplex, /* r_mask g_mask b_mask*/ {0xFFF00000, 0x0}, /* progessive or interleaving */ VI_SCAN_PROGRESSIVE, /*AdChnId*/ {-1, -1, -1, -1}, /*enDataSeq, only support yuv*/ VI_DATA_SEQ_YUYV, /* synchronization information */ { /*port_vsync port_vsync_neg port_hsync port_hsync_neg */ VI_VSYNC_PULSE, VI_VSYNC_NEG_LOW, VI_HSYNC_VALID_SINGNAL,VI_HSYNC_NEG_HIGH,VI_VSYNC_VALID_SINGAL,VI_VSYNC_VALID_NEG_HIGH, /*hsync_hfb hsync_act hsync_hhb*/ {0, 1280, 0, /*vsync0_vhb vsync0_act vsync0_hhb*/ 0, 720, 0, /*vsync1_vhb vsync1_act vsync1_hhb*/ 0, 0, 0} }, /* input data type */ VI_DATA_TYPE_RGB, /* bRever */ HI_FALSE, {1920 , 1080}, { { {1920 , 1080}, }, { VI_REPHASE_MODE_NONE, VI_REPHASE_MODE_NONE } }, { WDR_MODE_NONE, 1080 }, DATA_RATE_X1};
DEV需要注意掩码的配置,根据芯片手册,12bit位宽,掩码为0xFFF00000,掩码如果配置不对,会导致VI采集失败
VI PIPE配置
VI_PIPE_ATTR_S PIPE_ATTR_1920x1080_RAW12_420_3DNR_RFR ={ VI_PIPE_BYPASS_NONE, HI_FALSE, HI_FALSE, 1920, 1080, PIXEL_FORMAT_RGB_BAYER_12BPP, COMPRESS_MODE_LINE, DATA_BITWIDTH_12, HI_FALSE, { PIXEL_FORMAT_YVU_SEMIPLANAR_420, DATA_BITWIDTH_10, VI_NR_REF_FROM_RFR, COMPRESS_MODE_NONE }, HI_FALSE, { -1, -1}};
VI CHN配置
VI_CHN_ATTR_S CHN_ATTR_1920x1080_420_SDR8_LINEAR ={ {1920, 1080}, PIXEL_FORMAT_YVU_SEMIPLANAR_420, DYNAMIC_RANGE_SDR8, VIDEO_FORMAT_LINEAR, COMPRESS_MODE_NONE, 0, 0, 0, { -1, -1}};
ISP配置
mpp/sample/common/sample_comm_isp.c中修改ISP相关配置
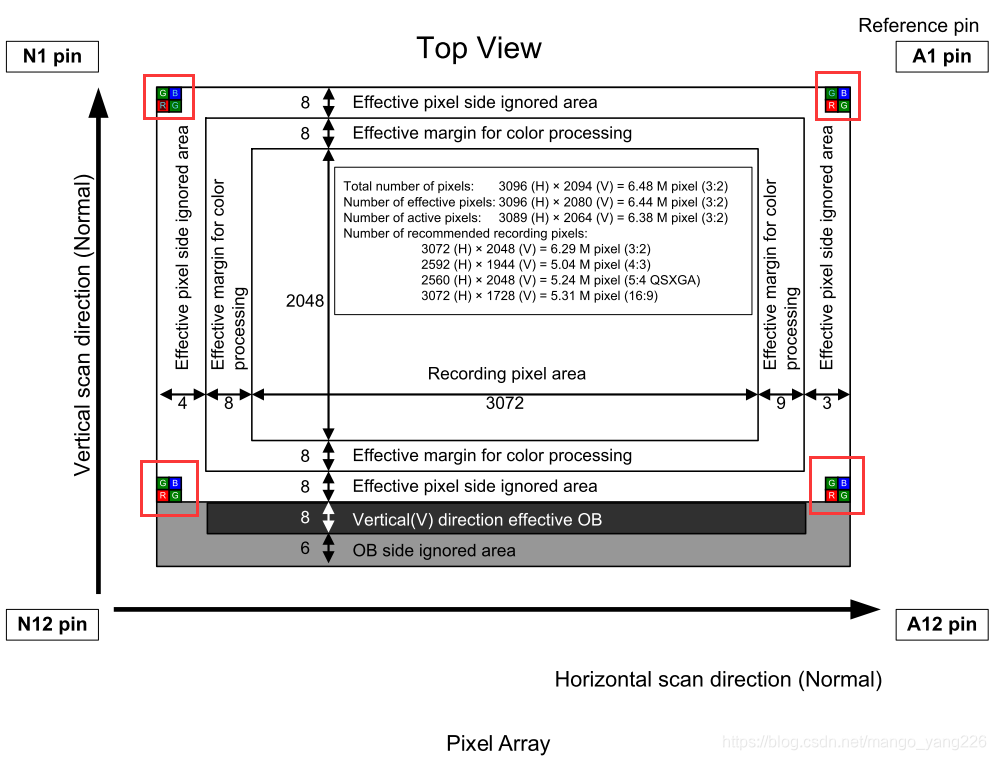
ISP_PUB_ATTR_S ISP_PUB_ATTR_IMX178_2K_60FPS ={ {0, 0, 1920, 1080}, {1920, 1080}, 60, BAYER_GBRG, WDR_MODE_NONE, 0,};
需要注意BAYER_FORMAT,这里配置为BAYER_GBRG,如果配置不对,会导致采集到的图像颜色异常
至此,IMX178的移植相关配置已全部完成。